Diferenţialul cu alunecare limitată (de asemenea: diferenţial cu alunecare limitată (LSD), diferenţial cu alunecare limitată, diferenţial autoblocant , diferenţial cu alunecare limitată ) este un diferenţial , a cărui mecanică, datorită rezistenţei interne sporite structural inerente între unele piese rotative, permite astfel de un diferențial fără acțiuni de control din exterior pentru a egaliza în mod independent vitezele unghiulare ale legăturilor de antrenare și antrenate până la blocarea lor reciprocă completă și transformarea întregului diferențial într-o transmisie directă.
Trebuie avut în vedere că în literatura engleză aceste diferențe sunt denumite „LSD (Limited-Slip Differential)”, adică „limited slip differential” (alunecare), iar acest termen nu definește principiul fizic de funcționare. a dispozitivului, prezența frecării, rezistenței, dar și prezența / absența controlului diferențial etc. Contează doar funcția de blocare a unei diferențe necontrolate a vitezelor unghiulare ale acționărilor („alunecare”). „Alunecare limitată” implică de obicei o anumită limită predeterminată a diferenței de viteze unghiulare, peste care încuietoarea începe să funcționeze. În unele implementări, blocarea poate fi utilizată preventiv, adică chiar înainte ca arborii de osie să aibă o diferență de viteze unghiulare.
Principalul avantaj al unui diferențial de rezistență internă limitată (LDR) poate fi văzut luând în considerare cazul unui diferențial convențional (sau „deschis”), în care o roată nu are deloc contact cu drumul. În acest caz, a doua roată în contact cu drumul va rămâne staționară, iar prima roată care nu este în contact cu șoseaua se va roti liber - cuplul transmis va fi egal pe ambele roți, dar nu va depăși valoarea de prag a momentului necesar. pentru deplasarea vehiculului și, prin urmare, vehiculul va rămâne staționar. La mașinile convenționale care circulă pe drumuri asfaltate, această situație este puțin probabilă și, prin urmare, pentru astfel de mașini, un diferențial convențional este destul de potrivit. Când conduceți în condiții mai dificile, cum ar fi atunci când conduceți în noroi sau în teren, se întâmplă aceste situații, iar prezența unui diferențial cu rezistență internă crescută vă permite să nu opriți mișcarea. Prin limitarea diferenței de viteze unghiulare ale roților se transmite momentul util atâta timp cât cel puțin una dintre roți are tracțiune.
Coeficientul de blocare este cea mai importantă proprietate de evaluare a oricărui RPA. În materialele informaționale despre RPA, acest coeficient poate fi exprimat în două moduri și diferă oarecum în sensul interpretării, deși în ambele cazuri înseamnă același lucru, doar din puncte de vedere diferite.
În literatura tehnică străină, KB este de obicei exprimat ca valoare procentuală în zeci de procente în intervalul de 20% și mai mult. Numărul indică lățimea intervalului de distribuție relativă a cuplului între roți/axii acoperite de un RPA specific de la static (corectat pentru posibila sa asimetrie) încorporat în diferențial până la nivelul maxim de 100/0, în cadrul căruia RPA poate asigura blocarea reciprocă. Această definiție se încadrează în termenul englezesc Locking Effect („efect de blocare”). În literatura tehnică în limba rusă, KB este exprimat ca un număr de la 2 și mai mare (de obicei, fără fracții zecimale), indicând diferența maximă posibilă de cupluri (diferența de forță de tracțiune) pe roți / osii, în cadrul căreia un anumit RPA poate asigura blocarea lor reciprocă. Această definiție a KB corespunde termenului englez Torque Bias („schimbarea cuplului”).
Deși ambele concepte de CB implică formule de calcul diferite, absolut orice RPA poate fi estimat corect de către oricare dintre ele. În același timp, fiecare dintre cele două valori KB poate fi corelată cu indicatorul estimat global și există întotdeauna o corespondență unu-la-unu între ambele valori. Deci, de exemplu, valoarea lui KB = 50% și KB = 3 înseamnă același lucru în ambele cazuri: că RPA cu KB specificat permite redistribuirea cuplului între roți / osii într-un raport de cel mult 75/ 25, care, pe de o parte, oferă 50 % din întreaga gamă de posibilă redistribuire a cuplului efectiv utilizat (75-25=50), iar pe de altă parte oferă o diferență de trei ori în forța posibilă de tracțiune (75/25). =3). Valoarea numerică (nu procentuală) a lui KB este poate mai intuitivă aici, mai ales că, pe lângă semnificația sa principală, implică o diferență similară în forța de aderență admisă a roților/axelor la suprafață, care în același caz KB = 3 înseamnă că utilizarea maximă eficientă a puterii motorului pe acest RPA este posibilă numai dacă forța de prindere a fiecărei roți cu suprafața drumului diferă de cel mult trei ori.
Un diferențial simplu (gratuit) nu vă permite să obțineți nicio diferență în cuplurile utilizate efectiv pe legăturile antrenate, aici diferența dintre forța de tracțiune a ambelor roți / osii este practic zero în orice mod, KB unui astfel de diferențial este 0 % sau 1. Transmisia directă sau diferențialele blocate permit realizarea întregului cuplu eficient utilizat pe orice legătură antrenată, aici orice roată/osie poate oferi toată tracțiunea la un nivel zero de tracțiune pe cealaltă roată/osie, iar KB în acest caz este 100% sau infinit.
RPA poate avea două valori KB superioare, câte una pentru fiecare ramură de putere. Acest lucru este posibil în cazurile unei diferențe asimetrice, atunci când biroul de proiectare primește o corecție pentru asimetrie - adică valorile superioare ale biroului de proiectare pentru fiecare dintre laturi diferă între ele prin diferența de raport. a cuplurilor desfășurate (de exemplu, într-o roată transversală asimetrică cu came spate DPVS a unui camion GAZ-66, descompunând cuplul pe roți în raportul ≈(60/40), valorile KB pentru dreapta și roțile din stânga sunt 3.1 și, respectiv, 2.1). Și acest lucru este posibil în diferențele simetrice, atunci când este permis structural de mecanica operațiunii de blocare (de exemplu, în angrenajul melcat simetric Torsen Type-1 RPAS, diferite valori ale KB pot fi realizate prin diferite unghiuri de tăiere a dinţilor din fiecare pereche satelit-angrenaj).
De obicei, CB al unui anumit RPA este CB maxim. În același timp, orice RPA are o valoare a așa-numitului KB inițial, care de obicei nu este declarată.
Acest termen înseamnă crearea în RPA a rezistenței interne la rotația reciprocă a legăturilor antrenate în statică, adică în absența oricărui cuplu aplicat diferenţialului. Valoarea nivelului de preîncărcare este determinată de forța necesară pentru deplasarea (rotirea) oricărei biele de antrenare diferențiale atunci când legătura de antrenare este staționară. Într-un diferențial liber, nivelul de preîncărcare este aproape de zero. Preîncărcarea, dacă există, „funcționează” întotdeauna, indiferent dacă RPAS este încărcat cu tracțiune sau cuplu de frânare sau nu. Prezența preîncărcării nu este o condiție prealabilă pentru funcționarea RPA.
Așa-numitul „ambreiaj de preîncărcare” implică un anumit dispozitiv în interiorul RPA care îndeplinește funcțiile de mai sus și îngreunează rotirea reciprocă a angrenajelor antrenate diferențiale. Designul acestui dispozitiv nu are o formă universală și poate fi oricare pe RPA diferit. De obicei, acestea sunt arcuri distanțiere de diferite forme, completate de inele distanțiere.
Două tipuri de RPA sunt utilizate în mod obișnuit în mașinile de pasageri:
Diferențiale de ambele tipuri permit o diferență programată structural între cupluri (în primul caz) sau viteze unghiulare (în al doilea caz), dar impun o limitare mecanică asupra apariției unei disproporții mari.
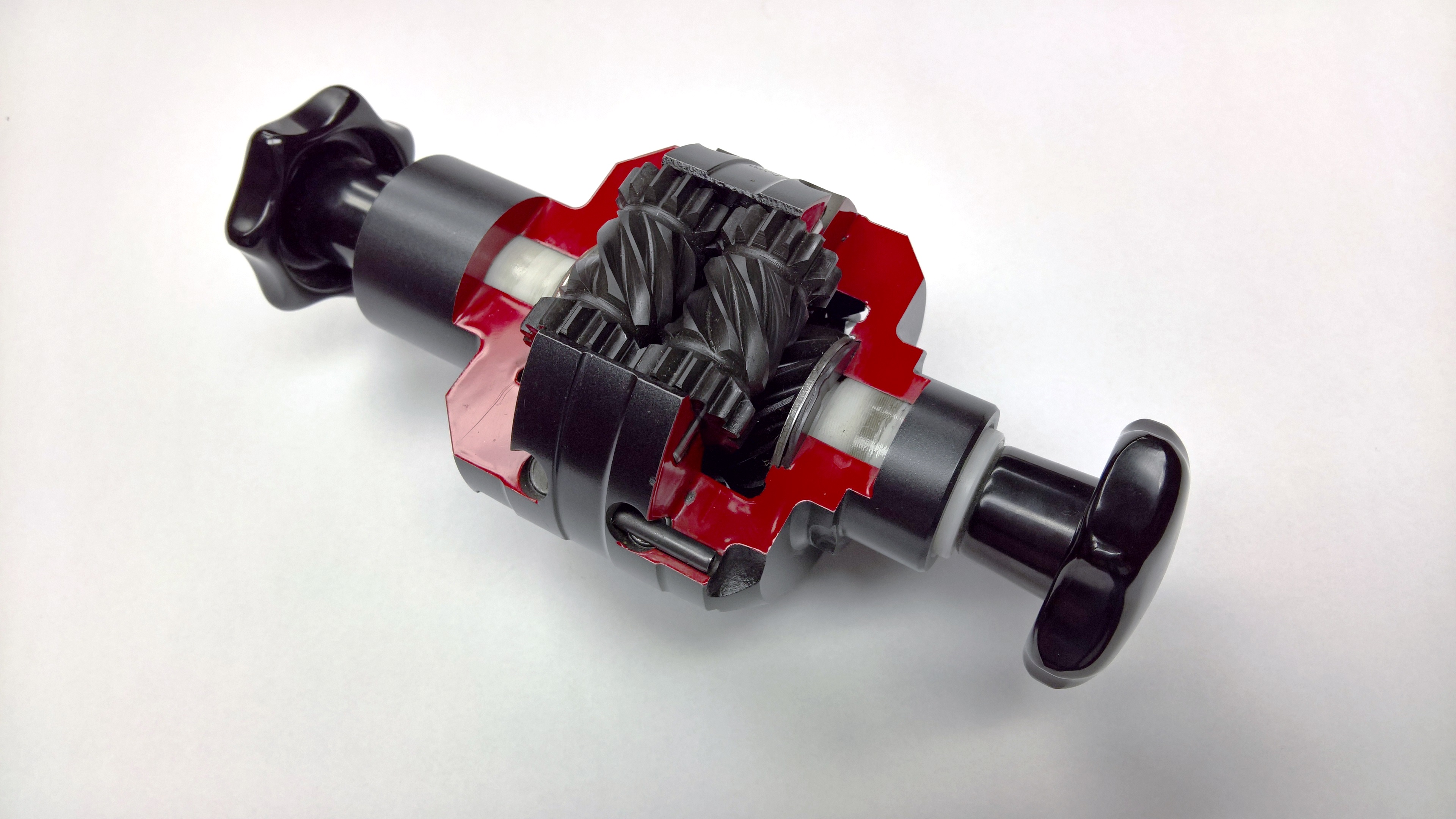
Din punct de vedere structural, diferențiale blocate cu șuruburi pot fi realizate pe baza oricărui mecanism planetar plat cu un singur rând sau cu două rânduri de scheme SHS sau SVE cu axe paralele ale sateliților, care, la rândul lor, pot fi interconectați fie simple, fie perechi. Vor exista două caracteristici comune oricărui tip de performanță: utilizarea angrenajelor elicoidale cilindrice în toate perechile de angrenare și absența axelor de satelit reale ca piese. Angrenajul elicoidal , ca atare, nu este folosit aici, iar termenul folosit în mod obișnuit provine numai de la asemănarea vizuală a pinioanelor diferențiale cu șurubul, mai ales în contrast cu angrenajele sale principale. Iar angrenajele satelit de aici nu se rotesc pe osii, ci în buzunare cilindrice frezate în carcasa/suportul diferenţialului. Ideea de blocare se bazează pe faptul că în angrenajele elicoidale sub sarcină apar forțe axiale, care tind să împingă ambele roți dințate de-a lungul axelor lor în direcții opuse față de planul de contact, iar aici această proprietate este utilizată în principal în perechi de sateliți interblocați. , care pentru aceasta primesc o oarecare mobilitate axială. Sub tracțiune, la întoarcerea sau alunecarea roții, sateliții rotativi înghețați în buzunarele lor, se sprijină de capetele carcasei diferenţialului, datorită cărora sunt frânate și auto-aliniind vitezele unghiulare ale angrenajelor antrenate. Punerea sateliților este cu atât mai puternică, cu atât cuplul transmis de aceștia este mai mare, însă coeficientul de blocare în sine este determinat de unghiul de înclinare al dinților de angrenare și de proprietățile de frecare ale perechilor de contacte satelit/carcasă. Pentru a spori efectul de autofrânare în aceste diferențiale, trei perechi de sateliți sunt de obicei utilizate mai mult decât minimul necesar pentru un mecanism planetar plat - și anume, de la patru până la șapte perechi. Și pentru a spori efectul de frecare în punctele de contact ale capetelor sateliților cu carcasa diferenţialului, se pot folosi discuri distanţiere dintr-un material care creează rezistenţă sporită la frecare. În cazul sateliților unici, funcționarea diferențialului este practic similară, singura diferență fiind că aici nu doar sateliții, ci și angrenajele centrale ale diferențialului sunt implicați în autofrânare.
Datorită faptului că angrenajele elicoidale pot fi utilizate pe angrenaje planetare plate de orice schemă și formă, diferențele bazate pe acestea pot fi realizate cu aproape orice raport de transmisie dat în fiecare pereche de legături master-slave. În consecință, astfel de diferențe pot fi atât simetrice, cât și asimetrice și pot fi utilizate în transmisie atât ca între roți, cât și ca interax. Preîncărcarea este utilizată în mod activ pe aceste diferențe, iar momentul de blocare aici este creat în modul de tracțiune chiar și în absența unei diferențe de viteze unghiulare la ieșire. Dar exclusiv în cazul angrenajului elicoidal, valorile mari ale coeficientului de blocare nu sunt disponibile (de obicei < 3) și pentru a spori efectul, astfel de diferențe pot fi completate cu pachete de frecare, cum ar fi diferențiale blocate cu disc.
Diferențiale cu blocare cu șurub sunt foarte comune astăzi. Domeniul lor principal de aplicare sunt mașinile sportive și de curse. Ele sunt, de asemenea, folosite ca tuning pentru o ușoară îmbunătățire a permenței la mașinile rutiere. Cu toate acestea, pe vehiculele de teren adevărate, acestea nu sunt de obicei utilizate. Cele mai cunoscute mostre sunt de la compania britanică Quaife Engineering și americanul Torsen NA Inc. . În primul caz, diferența se numește - Quaife . În al doilea caz, acestea sunt așa-numitele Torsen Type-2 și Torsen Type-3 .
Din punct de vedere structural, toate diferențele de blocare cu vierme sunt realizate pe baza unor mecanisme planetare spațiale simple ale schemei SVS cu sateliți pe osii de cruce . Vizual, perechile de angajare soare-sateliți arată aici ca un angrenaj melcat , în care axele roții melcate și viermele în sine sunt, de asemenea, perpendiculare între ele și nu se intersectează. Atât sateliții, cât și angrenajele conduse pot acționa ca un melc și o roată melc, și există dezvoltări ale unui blocaj melcat cu ambele opțiuni pentru distribuirea rolurilor între angrenaje. Ideea de blocare se bazează pe faptul că un angrenaj melcat se caracterizează prin autofrânare în cazurile în care puterea este direcționată de la roata melcat către melcat, care este cu atât mai puternic, cu atât unghiul de înclinare al dinților melcat este mai mare. faţă de axa sa de rotaţie.
Deși diferenţialul cu blocare vierme este cel mai bine cunoscut în varianta dezvoltată de American Torsen NA Inc. , - așa-numitul Torsen Type-1 - compania de dezvoltare însăși, dintr-un anumit motiv, evită termenul „angrenaj melcat” atunci când își descrie diferența. Trenul de angrenaj aici este declarat ca elicoidal pe axe care se intersectează, dar nu doar elicoidal, ci cu unele specifice, dezvoltate de Torsen însuși și patentate de aceștia , forma dinților Invex™ , care este de fapt o versiune privată a angrenajului în evolventă . În literatura de inginerie în limba rusă, se crede că în Torsen Type-1 , rolul viermilor este jucat de angrenajele conduse, iar rolul roților melcate este sateliții. Explicația pentru aceasta provine din unghiul diferit de înclinare a tăieturii elicoidale pe angrenajele conduse și sateliți. Forma neobișnuită cu trei rânduri a satelitului, cu angrenaj cilindric de-a lungul marginilor și angrenaj elicoidal în centru, se explică numai prin faptul că, datorită aspectului cu axe care se intersectează, este imposibil din punct de vedere structural să se organizeze prin aceeași angrenare tăind simultan angajarea ambilor sateliți cu angrenaje conduse și a sateliților între ei și pentru a crește rezistența internă a diferenţialului, această caracteristică este irelevantă. Ambele roți dințate conduse aici au tăierea codirecțională a dinților și o mobilitate axială minimă, care, ca și în cazul diferențialelor blocate cu șurub, este necesară pentru a schimba ambele trepte de-a lungul axei sub sarcină, numai în acest caz nu pentru contactul cu carcasă, ci pentru auto-frânarea reciprocă reciprocă, ceea ce contribuie semnificativ la creșterea generală a rezistenței interne. Diferenţial sensibil la cuplu. Coeficientul de blocare în diferite versiuni este 3-6. Diferențialul este simetric vizual și cinematic, iar în cazul unui diferențial interax, a fost folosit la modificări ale mașinilor AWD , inițial cu tracțiune față. În general, Torsen Type-1 este unul dintre cele mai cunoscute modele RPA. A fost utilizat pe scară largă în mașinile de curse WRC și Formula 1 de diferiți ani, atât ca interroată, cât și ca interax. Și pe mașinile rutiere, a devenit o asociere complet fără ambiguitate cu sistemele de tracțiune integrală de la Audi - Quattro - deși Audi a folosit alte opțiuni în evoluțiile recente. Printre vehiculele de teren, un transportator binecunoscut al acestui RPA este Hummer H1 .
Diferențiale reale blocate cu vierme cu rapoarte de blocare mari (de ordinul a 10 și chiar mai mari) au fost modele americane și germane pentru camioanele de teren. În acest caz, proiectarea mecanismului planetar RPVS a presupus sateliți tripli interblocați, dintre care doi sateliți erau viermi, iar unul era o roată vierme. De asemenea, roțile antrenate erau roți melcate, iar în total erau 8 melcuri și 6 roți melcate de două dimensiuni în diferențial. Principalele încercări de utilizare în masă a acestor RPA-uri au avut loc în anii prebelici. În URSS, acest tip de RPA a fost testat după război, atât sub formă de trofee de la Rheinmetall-Borsig AG , cât și sub formă de dezvoltări de locuințe cu un design „îmbunătățit” bazat pe cel german. Nu sunt disponibile date pentru transportatorii americani și germani specifici, deși se crede că diferențele blocate cu vierme au fost comune pe diferite camioane și tractoare de teren și de carieră. În URSS, singurul transportator mai mult sau mai puțin de masă este Ural-375D . Utilizarea modernă este probabil nulă.
Din punct de vedere structural, un diferențial blocat cu disc constă întotdeauna dintr-un mecanism planetar al schemei SHS pe roți dințate conice, suplimentat de o pereche de ambreiaje de frecare conice miniaturale și o pereche de pachete de frecare cu mai multe plăci situate de-a lungul axei diferențialului pe ambele părți între angrenajele conduse și carcasa. Unele dintre discurile de frecare de aici sunt cuplate cu carcasa diferenţialului, iar altele sunt cuplate cu un ambreiaj în formă de con miniaturală, care se împerechează fiecare cu propria sa treaptă condusă (soare). Ideea de blocare se bazează pe faptul că, sub sarcină, în angrenajele conice apar forțe axiale, având tendința de a împinge angrenajele angrenate unul de celălalt și, spre deosebire de un diferențial liber, unde încearcă să niveleze acest efect, este tocmai datorită faptului că pachetele de frecare dintre angrenajele conduse sunt comprimate și carcasa diferenţialului, ceea ce duce la rândul său la alinierea vitezelor unghiulare. Pe lângă ambreiajele conice și pachetele de frecare, aici este adesea folosit un arc distanțier pentru a spori efectul, instalat între angrenajele conduse. Și pentru a spori efectul, aceste diferențe au de obicei nu doi, ci patru sateliți pe purtătorul cruciform.
Dezvoltarea unor astfel de diferențe este cunoscută încă din perioada antebelică - firmele americane LeTurno-Westinghouse și Borg Warner erau angajate în ele. Diferențialele și-au dobândit aspectul modern și blocarea discului în anii 60, când au apărut materiale de frecare relativ fiabile, ceea ce a făcut posibil ca întregul sistem să fie compact și potrivit pentru mașini. Astăzi, ele sunt folosite ca axe transversale în axele motoare din spate atât ale vehiculelor sport, cât și ale vehiculelor de teren. Fiabil, dar poate necesita ajustare în timp.
Din punct de vedere structural, există două opțiuni. Într-un caz, un ambreiaj cu came , constând din două discuri cu came și un separator intermediar cu cracare , este situat între ambele angrenaje antrenate ale unui diferențial liber. În al doilea caz, angrenajul planetar al diferențialului nu are deloc roți dințate: inelul separator servește ca purtător ersatz al diferențialului, sateliții sunt crackeri, iar rolul angrenajelor conduse este îndeplinit de două discuri cu came sau inele. cu un profil ondulat al suprafeței care se împerechează cu separatorul. În ambele cazuri, ideea de blocare se bazează pe faptul că, cu o anumită diferență între vitezele unghiulare ale legăturilor antrenate, crackerele sunt înțepate între discurile sau inelele cu came și blochează aproape instantaneu diferența. Blocarea aici funcționează numai pe diferența de viteze unghiulare. Până la o anumită valoare a acestei diferențe, diferențialul funcționează ca liber, la atingerea acestuia se blochează imediat, și nu contează dacă este încărcat cu cuplu sau nu. Nu există un mod de tranziție de blocare parțială între stările libere și blocate.
Prima dezvoltare cunoscută a diferențialelor cu came este probabil de Ferdinand Porsche . Diferenţialul lui a intrat în serie pe maşinile KdF-Kübelwagen . Astăzi, diferențialele cu came cu autoblocare sunt utilizate în principal ca diferențe între roți în vehiculele de teren și în echipamentele militare (transporturi blindate etc.).
Din punct de vedere structural, diferențialele blocate cu bile sunt un fel de angrenaj planetar ersatz al schemei SHS simetrice . Formal, nu au nici angrenaje, nici sateliți în proiectarea lor, dar de fapt, funcțiile părților lor constitutive și principiul general de funcționare a acestora sunt identice cu proiectarea și principiul de funcționare al oricărui diferențial planetar real, iar mecanica de blocare este determinată. printr-o creștere a rezistenței interne la lucru, ca și în alte tipuri de diferențiale autoblocante. În rolul sateliților, aici sunt folosite bile, care sunt strâns împachetate în caneluri bucle din carcasa (suportul) diferențialului și care, ca sateliții reali, contactează simultan între ele și cu o pereche de angrenaje ersatz conduse (două sori). Cu o mică diferență de viteze unghiulare, bilele, împingându-se una pe cealaltă, se mișcă în canelura buclă într-o direcție sau alta, oferind o rotație diferențială a întregii structuri. Când se atinge un anumit nivel de diferență în vitezele unghiulare (alunecare) ale angrenajelor antrenate, bilele nu îl pot menține (diferența), datorită frecării se autofrânează în canelurile lor și creează astfel un efect de blocare.
Acest design este puțin cunoscut în industria auto globală și distribuția sa este probabil limitată la Rusia și Ucraina. Cele mai faimoase diferențiale blocate cu bile sunt diferențialul automat Krasikov și diferențialul automat Nesterov.
Din punct de vedere structural, diferența constă dintr-un mecanism planetar simplu de absolut orice circuit și un cuplaj vâscos care conectează oricare două dintre legăturile sale (oricare doi arbori de alimentare/demontare). Cuplajul vâscos poate fi amplasat atât în interiorul diferențialului și poate conecta două legături antrenate, fie în exterior și poate conecta legăturile antrenate și antrenate (locația cuplajului vâscos nu afectează funcționarea fundamentală a întregului sistem). Ideea de blocare se bazează pe proprietățile unui cuplaj vâscos de a egaliza vitezele unghiulare ale celor două legături ale sale datorită proprietăților unui fluid dilatant. Blocarea este declanșată numai de diferența de viteze unghiulare. Blocarea 100% este permisă pentru o perioadă scurtă de timp. Modurile de tranziție sunt, de asemenea, utilizate în mod activ.
RPA-urile vâscoase sunt mai puțin eficiente decât RPA-urile mecanice menționate mai sus, deoarece disipă energie. În special, orice sarcină permanentă care încălzește fluidul din interiorul cuplajului are ca rezultat o pierdere permanentă permanentă a „efectului diferențial”. [unu]
Acest RPA nu trebuie confundat cu utilizarea unui cuplaj vâscos în așa-numitele sisteme de tracțiune integrală la cerere .
La diferențiale de acest tip, corpul pompei gerotor se rotește pe o parte , iar pe partea opusă se rotește un arbore conectat la o roată dințată din interiorul pompei. Când există o diferență între frecvențele de rotație ale carcasei și ale angrenajului, pompa comprimă fluidul de lucru în cavitatea internă a pompei. Acest lucru asigură transferul cuplului către roata mașinii, care are o aderență mai puternică. Sistemele bazate pe pompe au limite superioare și inferioare de presiune și amortizare internă pentru a evita histerezisul . Cele mai recente sisteme cu pompe gerotor au putere de ieșire controlată de computer, ceea ce oferă o mobilitate mai mare și elimină oscilațiile.
Dezvoltarea sistemelor electronice în mașini a făcut posibilă controlul blocării arborilor de punți folosind unități de control electronice (ECU). Aceste sisteme folosesc neapărat senzori diferiți.
Primul pas a fost utilizarea senzorilor antiblocare a roților (ABS) pentru a determina diferența de viteză unghiulară a roților care alunecă și apoi a forța utilizarea sistemului de frânare pentru a încetini individual rotirea roții la viteză prea mare - și, astfel, redistribuiți momentul către roata opusă prin diferențial liber. Funcția unui diferențial cu autoblocare în astfel de vehicule este imitată, diferențialul în sine rămâne în mod clasic liber și, prin urmare, o astfel de soluție este destul de ieftină, nu afectează parametrii mașinii și nu necesită întreținere specială. Astfel de sisteme au fost denumite în mod colectiv „ anti-alunecare ”. De fapt, sunt o versiune mai avansată a sistemului ABS, care funcționează nu numai în timpul frânării, ci și în timpul mișcării și accelerației. Folosit și ca parte a unui sistem mai global de „stabilizare” a caroseriei mașinii pe șosea în condiții de derapare. Aceste sisteme sunt însă limitate de performanța sistemului de frânare, predispus la supraîncălzire cu funcționare continuă și pierderea ulterioară a eficienței. Pe deplin vehiculele de teren, de obicei, nu sunt utilizate.
A doua etapă a fost introducerea sistemelor electronice de control cu ambreiaje de fricțiune implementate pe fiecare arbore de osie. Astfel de ambreiaje pot fi deschise atunci când se conduce la viteze unghiulare aproximativ egale, sau invers, închise pentru un transfer constant de cuplu similar cu FullTime 4WD, dar atunci când electronica determină situația de alunecare și, de asemenea, pentru a preveni aceasta, ambreiajele necesare sunt reduse. cu o forță calculată, care transmite mai mult cuplu unei axe mai puțin mobile. Este utilizat, de exemplu, în sistemele Haldex-4, VTM-4. Pot fi implementate atat cu ajutorul ambreiajelor electrice, cat si a celor hidraulice, pentru care se foloseste o pompa electrica.
A treia etapă în dezvoltarea unor astfel de diferențe este așa-numita. „ diferențiale active ”, unde în loc de a bloca furnizarea cuplului, se folosește controlul constant al distribuției de forță între arborii punților. Într-o serie de implementări, precum Honda SH-AWD, diferențialul spate este implementat doar funcțional, fără cea mai clasică mecanică diferențială și se bazează în întregime pe controlul electronic al tracțiunii și al vitezei roții din spate. În acest caz se folosește întregul moment transmis acestei axe, fără pierderi de frânare, acesta fiind doar redistribuit către arborele axului mai puțin alunecat. În același timp, devine posibilă creșterea controlabilității la viraj, datorită transferului unui cuplu crescut la arborele extern al axei și chiar cu o creștere a vitezei unghiulare mai mare decât în mod normal, datorită unei cutii de viteze cu un număr suplimentar crescător. Dacă oricare dintre senzorii utilizați de astfel de sisteme eșuează, tracțiunea către punte se oprește sau funcționalitatea scade. De asemenea, sistemul se poate opri singur, de exemplu, la supraîncălzire.
{kind=link}
{kind=link}
{kind=link}