Moment de inerție
Versiunea actuală a paginii nu a fost încă examinată de colaboratori experimentați și poate diferi semnificativ de versiunea revizuită pe 24 decembrie 2020; verificările necesită 6 modificări .| Moment de inerție | |
|---|---|
| Dimensiune | L 2 M |
| Unități | |
| SI | kg m² _ _ |
| GHS | g cm² _ _ |

Momentul de inerție este o mărime fizică scalară , o măsură a inerției în mișcarea de rotație în jurul unei axe, la fel cum masa unui corp este o măsură a inerției sale în mișcarea de translație. Se caracterizează prin distribuția maselor în corp: momentul de inerție este egal cu suma produselor maselor elementare și pătratul distanțelor acestora față de mulțimea de bază (punct, linie sau axă).
Unitate de măsură în Sistemul Internațional de Unități (SI ) : kg m² .
Denumire : I sau J.
Există mai multe momente de inerție – în funcție de tipul de ansamblu de bază la care se măsoară distanțele față de masele elementare.
Momentul axial de inerție
Momentul de inerție al unui sistem mecanic față de o axă fixă („momentul de inerție axial”) este valoarea lui J a , egală cu suma produselor maselor tuturor celor n puncte materiale ale sistemului și pătratele lui distanțele lor față de axa [1] :

Unde:
- m i este masa punctului i - al,
- r i este distanța de la punctul i la axă.
Momentul axial de inerție al corpului J a este o măsură a inerției corpului în mișcare de rotație în jurul axei, la fel cum masa unui corp este o măsură a inerției sale în mișcare de translație .

Unde:
dm = ρ dV este masa unui element de volum mic al corpului dV , ρ este densitatea, r este distanța de la elementul dV la axa a .Dacă corpul este omogen, adică densitatea lui este aceeași peste tot, atunci

Teorema Huygens-Steiner
Momentul de inerție al unui corp rigid față de orice axă depinde de masa , forma și dimensiunea corpului, precum și de poziția corpului față de această axă. Conform teoremei Huygens-Steiner, momentul de inerție al unui corp J față de o axă arbitrară este egal cu suma momentului de inerție al acestui corp J c față de o axă care trece prin centrul de masă al corpului paralel cu axa considerată și produsul masei corporale m cu pătratul distanței d dintre axe [1] :

unde m este masa totală a corpului.
De exemplu, momentul de inerție al unei tije în jurul unei axe care trece prin capătul acesteia este:

Momentele axiale de inerție ale unor corpuri
| Corp | Descriere | o poziție a axei | Momentul de inerție J a |
|---|---|---|---|
| Punctul material de masă m | La o distanta r de punct, fix | ||
| Cilindru gol cu pereți subțiri sau inel cu raza r și masa m | Axa cilindrului | ||
| Cilindru solid sau disc cu raza r și masa m | Axa cilindrului | ||
| Cilindru gol cu pereți groși de masa m cu raza exterioară r 2 și raza interioară r 1 | Axa cilindrului | [Com. 1] | |
| Cilindru solid cu lungimea l , raza r și masa m | Axa este perpendiculară pe generatoarea cilindrului și trece prin centrul său de masă | ||
| Cilindru gol cu pereți subțiri (inel) cu lungimea l , raza r și masa m | Axa este perpendiculară pe cilindru și trece prin centrul său de masă | ||
| Tijă dreaptă subțire de lungime l și masă m | Axa este perpendiculară pe tijă și trece prin centrul său de masă | ||
| Tijă dreaptă subțire de lungime l și masă m | Axa este perpendiculară pe tijă și trece prin capătul acesteia | ||
| Sferă cu pereți subțiri cu raza r și masa m | Axa trece prin centrul sferei | ||
| Minge cu raza r și masa m | Axa trece prin centrul mingii | ||
| Con cu raza r și masa m | axa conului | ||
| Triunghi isoscel cu înălțimea h , baza a și masa m | Axa este perpendiculară pe planul triunghiului și trece prin vârf (la înălțime) | ||
| Triunghi regulat cu latura a și masa m | Axa este perpendiculară pe planul triunghiului și trece prin centrul de masă | ||
| Pătrat cu latura a și masa m | Axa este perpendiculară pe planul pătratului și trece prin centrul de masă | ||
| Dreptunghi cu laturile a și b și masa m | Axa este perpendiculară pe planul dreptunghiului și trece prin centrul de masă | ||
| N-gon regulat cu raza r și masa m | Axa este perpendiculară pe plan și trece prin centrul de masă | ||
| Torus (gol) cu raza cercului de ghidare R , raza generatricei r și masa m | Axa este perpendiculară pe planul cercului de ghidare al torului și trece prin centrul de masă |














![{\displaystyle {\frac {mr^{2}}{6}}\left[1+2\cos(\pi /n)^{2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6bf60937eb16b822e5b6212250fa8f13c794f3cb)

Derivarea formulelor
Cilindru cu pereți subțiri (inel, cerc)
Derivarea formuleiMomentul de inerție al unui corp este egal cu suma momentelor de inerție ale părților sale constitutive. Să împărțim un cilindru cu pereți subțiri în elemente cu masa dm și momente de inerție dJ i . Apoi

Deoarece toate elementele unui cilindru cu pereți subțiri sunt la aceeași distanță de axa de rotație, formula (1) este convertită în forma

Cilindru cu pereți groși (inel, cerc)
Derivarea formuleiSă fie un inel omogen cu raza exterioară R , raza interioară R 1 , grosimea h și densitatea ρ . Să-l împărțim în inele subțiri de grosime dr . Masa și momentul de inerție ale unui inel subțire cu raza r vor fi

Găsim momentul de inerție al unui inel gros ca integrală


Deoarece volumul și masa inelului sunt egale

obţinem formula finală pentru momentul de inerţie al inelului

Disc omogen (cilindru solid)
Derivarea formuleiConsiderând cilindrul (discul) ca un inel cu raza interioară zero ( R 1 = 0 ), se obține formula momentului de inerție al cilindrului (discului):

con solid
Derivarea formuleiSă împărțim conul în discuri subțiri de grosime dh perpendiculare pe axa conului. Raza unui astfel de disc este

unde R este raza bazei conului, H este înălțimea conului, h este distanța de la vârful conului la disc. Masa și momentul de inerție al unui astfel de disc vor fi


Integrarea, obținem

Minge solidă uniformă
Derivarea formuleiSă împărțim bila în discuri subțiri de grosime dh perpendiculare pe axa de rotație. Raza unui astfel de disc, situat la o înălțime h de centrul sferei, poate fi găsită prin formula

Masa și momentul de inerție al unui astfel de disc vor fi

Momentul de inerție al mingii se găsește prin integrare:

sferă cu pereți subțiri
Derivarea formuleiPentru a deduce, folosim formula pentru momentul de inerție al unei bile omogene cu raza R :

Să calculăm cât se va schimba momentul de inerție al mingii dacă, la o densitate constantă ρ , raza acesteia crește cu o valoare infinitezimală dR .

Tijă subțire (axa trece prin centru)
Derivarea formuleiSă împărțim tija în fragmente mici de lungime dr . Masa și momentul de inerție al unui astfel de fragment este

Integrarea, obținem

Tijă subțire (axa trece prin capăt)
Derivarea formuleiLa deplasarea axei de rotație de la mijlocul tijei până la capătul acesteia, centrul de greutate al tijei se deplasează față de axă cu o distanță l ⁄ 2 . Conform teoremei Steiner, noul moment de inerție va fi egal cu
Momentele de inerție fără dimensiuni ale planetelor și sateliților lor [2] [3] [4]
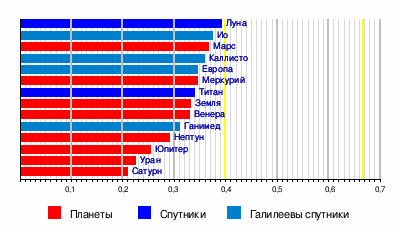
Momentele de inerție fără dimensiuni ale planetelor și sateliților
De mare importanță pentru studiile structurii interne a planetelor și a sateliților lor sunt momentele lor de inerție fără dimensiuni. Momentul de inerție adimensional al unui corp cu raza r și masa m este egal cu raportul dintre momentul său de inerție în jurul axei de rotație și momentul de inerție al unui punct material de aceeași masă în jurul unei axe fixe de rotație situate la o distanță r (egală cu mr 2 ). Această valoare reflectă distribuția masei în adâncime. Una dintre metodele de măsurare a acesteia pentru planete și sateliți este de a determina deplasarea Doppler a semnalului radio transmis de AMS care zboară în jurul unei planete sau satelit dat. Pentru o sferă cu pereți subțiri, momentul de inerție adimensional este egal cu 2/3 (~0,67), pentru o bilă omogenă este de 0,4 și, în general, cu cât este mai mică, cu atât masa corpului este mai mare concentrată în centrul său. De exemplu, Luna are un moment de inerție adimensional apropiat de 0,4 (egal cu 0,391), deci se presupune că este relativ omogenă, densitatea ei se modifică puțin cu adâncimea. Momentul de inerție adimensional al Pământului este mai mic decât cel al unei bile omogene (egal cu 0,335), ceea ce este un argument în favoarea existenței unui nucleu dens [5] [6] .
Momentul de inerție centrifugal
Momentele de inerție centrifuge ale unui corp față de axele unui sistem de coordonate carteziene dreptunghiulare sunt următoarele mărimi [1] [7] :



unde x , y și z sunt coordonatele unui element mic al corpului cu volum dV , densitate ρ și masă dm .
Axa OX se numește axa principală de inerție a corpului , dacă momentele centrifuge de inerție J xy și J xz sunt simultan egale cu zero. Prin fiecare punct al corpului pot fi trasate trei axe principale de inerție. Aceste axe sunt reciproc perpendiculare între ele. Momentele de inerție ale corpului față de cele trei axe principale de inerție trasate într-un punct arbitrar O al corpului se numesc momentele de inerție principale ale acestui corp [7] .
Principalele axe de inerție care trec prin centrul de masă al corpului sunt numite principalele axe centrale de inerție ale corpului , iar momentele de inerție din jurul acestor axe sunt numite principalele sale momente de inerție centrale . Axa de simetrie a unui corp omogen este întotdeauna una dintre principalele sale axe centrale de inerție [7] .
Momente geometrice de inerție
Momentul geometric de inerție al volumului față de axă este caracteristica geometrică a corpului, exprimată prin formula [8] :

unde, ca mai înainte, r este distanța de la elementul dV la axa a .
Dimensiunea lui J Va este lungimea până la a cincea putere ( ), respectiv unitatea SI este m 5 .

Momentul geometric de inerție al ariei față de axă este caracteristica geometrică a corpului, exprimată prin formula [8] :

unde integrarea se realizează pe suprafaţa S şi dS este un element al acestei suprafeţe.
Dimensiunea lui J Sa este lungimea până la a patra putere ( ), respectiv unitatea SI este m 4 . În calculele de construcție, literatură și sortimente de metal laminat , este adesea indicat în cm 4 .

Prin momentul geometric de inerție al zonei , momentul rezistenței secțiunii se exprimă :

Aici r max este distanța maximă de la suprafață la axă.
| Momentele geometrice de inerție ale zonei unor figuri | |
|---|---|
| Înălțime și lățime dreptunghi : |
|
| Secțiune cutie dreptunghiulară cu înălțime și lățime de-a lungul contururilor exterioare și , și de-a lungul interioarei și respectiv |
|
| Diametrul cercului | |










Moment de inerție față de un avion
Momentul de inerție al unui corp rigid față de un anumit plan se numește valoare scalară egală cu suma produselor masei fiecărui punct al corpului și pătratul distanței de la acest punct la planul luat în considerare [9] ] .
Dacă trasăm axe de coordonate printr-un punct arbitrar , atunci momentele de inerție relativ la planurile de coordonate și vor fi exprimate prin formulele:








În cazul unui corp solid, însumarea este înlocuită de integrare.
Momentul central de inerție
Momentul central de inerție ( momentul de inerție în jurul punctului O, momentul de inerție în jurul polului, momentul polar de inerție ) este o mărime definită prin expresia [9] :

Unde:
- este masa unui element de volum mic al corpului ,
- - densitate,
- este distanța de la element la punctul O.




Momentul central de inerție poate fi exprimat prin momentele de inerție axiale principale, precum și prin momentele de inerție relativ la plane [9] :


Tensorul de inerție și elipsoidul de inerție
Momentul de inerție al unui corp în jurul unei axe arbitrare care trece prin centrul de masă și având o direcție dată de un vector unitar poate fi reprezentat sub formă pătratică (bilineară) :
(unu)

unde este tensorul de inerție . Matricea tensorului de inerție este simetrică, are dimensiuni și constă din componente de moment centrifugal:





Prin alegerea unui sistem de coordonate adecvat, matricea tensorului de inerție poate fi redusă la o formă diagonală. Pentru a face acest lucru, trebuie să rezolvați problema cu valori proprii pentru matricea tensorială :


unde este matricea de tranziție ortogonală la baza proprie a tensorului de inerție. În propria bază, axele de coordonate sunt direcționate de-a lungul axelor principale ale tensorului de inerție și, de asemenea, coincid cu semiaxele principale ale elipsoidului tensorului de inerție. Mărimile sunt principalele momente de inerție. Expresia (1) în propriul sistem de coordonate are forma:



de unde se obţine ecuaţia elipsoidului în coordonate proprii. Împărțirea ambelor părți ale ecuației cu


și efectuarea înlocuirilor:

obținem forma canonică a ecuației elipsoidului în coordonate :


Distanța de la centrul elipsoidului la unele dintre punctele sale este legată de valoarea momentului de inerție al corpului de-a lungul unei linii drepte care trece prin centrul elipsoidului și acest punct:

Vezi și
- Cinematica unui corp rigid
- Metoda componentei principale
- Rezistența materialelor
- teorema lui Steiner
- Teorema lui König (mecanica)
- Aplicații mecanice ale integralei triple
- Aplicații mecanice ale integralei duble
- Momentul polar de inerție
- Lista momentelor de inerție
- Moment de putere
- impuls unghiular
Comentarii
- ↑ Utilizarea corectă a semnului „+” în această formulă poate fi verificată prin compararea momentelor de inerție ale unui cilindru cu pereți groși și al unui cilindru plin cu aceleași mase. Într-adevăr, masa primului dintre acești cilindri este în medie concentrată mai departe de axă decât a celui de-al doilea și, prin urmare, momentul de inerție al acestui cilindru trebuie să fie mai mare decât cel al unuia solid. Acest raport al momentelor de inerție este cel care oferă semnul „+”. Pe de altă parte, în limită, deoarece r 1 tinde spre r2 , formula pentru un cilindru gol cu pereți groși ar trebui să ia aceeași formă ca formula pentru un cilindru gol cu pereți subțiri . Evident, o astfel de tranziție are loc numai atunci când se utilizează o formulă cu semnul „+”.
Note
- ↑ 1 2 3 Targ S. M. Moment de inerție // Enciclopedia fizică / Cap. ed. A. M. Prohorov . - M .: Marea Enciclopedie Rusă , 1992. - T. 3. - S. 206-207. — 672 p. - 48.000 de exemplare. — ISBN 5-85270-019-3 .
- ↑ Planetary Fact Sheet . Consultat la 31 august 2010. Arhivat din original la 14 martie 2016.
- ↑ Showman, Adam P.; Malhotra, Renu. Sateliții Galileeni // Știință . - 1999. - Vol. 286 , nr. 5437 . - P. 77-84 . - doi : 10.1126/science.286.5437.77 . — PMID 10506564 .
- ↑ Margot, Jean-Luc; et al. Momentul de inerție al lui Mercur din datele de rotație și gravitație // Journal of Geophysical Research : jurnal. - 2012. - Vol. 117 . - doi : 10.1029/2012JE004161 .
- ↑ Galkin I.N. Seismologie extraterestră. — M .: Nauka , 1988. — S. 42-73. — 195 p. — ( Planeta Pământ și Universul ). — 15.000 de exemplare. — ISBN 502005951X .
- ↑ Panteleev V. L. Fizica Pământului și a planetelor. Ch. 3.4 - Câmpul gravitațional al planetei . Consultat la 31 august 2010. Arhivat din original la 3 octombrie 2013.
- ↑ 1 2 3 Targ S. M. Un scurt curs de mecanică teoretică. - M . : " Şcoala superioară ", 1995. - S. 269-271. — 416 p. — ISBN 5-06-003117-9 .
- ↑ 1 2 Buchholz N. N. Cursul principal de mecanică teoretică. - a 4-a ed. - M . : " Nauka ", 1966. - T. 2. - S. 131.
- ↑ 1 2 3 Yablonsky A. A. Dinamica // Curs de mecanică teoretică. - Ed. a 3-a. - M . : „ Școala superioară ”, 1966. - T. II. - S. 102-103. — 411 p.
Literatură
- Matveev. A. N. Mecanica și teoria relativității. Moscova: Școala superioară, 1986
- Trofimova T. I. Curs de fizică. - Ed. a VII-a. - M .: Şcoala superioară, 2001. - 542 p.
- Aleshkevich V. A., Dedenko L. G., Karavaev V. A. Mecanica corpului rigid. Prelegeri. Copie de arhivă din 7 ianuarie 2014 la Editura Wayback Machine a Facultății de Fizică a Universității de Stat din Moscova, 1997.
- Pavlenko Yu. G. Prelegeri de mecanică teoretică. M.: FIZMATLIT, 2002. - 392s.
- Yavorsky B. M. , Detlaf A. A. Fizica pentru elevii de liceu și cei care intră în universități: un manual - M.: Bustard, 2002, 800s. ISBN 5-7107-5956-3
- Sivukhin DV Curs general de fizică. În 5 volume.Volum I. Mecanica. a 4-a ed. Moscova: FIZMATLIT; Editura MIPT, 2005. - 560 p.
- Belyaev N. M. Rezistența materialelor. Ediția principală a literaturii fizice și matematice a editurii „Nauka”, 1976. - 608 p.
Link -uri
| | |
|---|---|
| Dicționare și enciclopedii |
|
| În cataloagele bibliografice |
|